




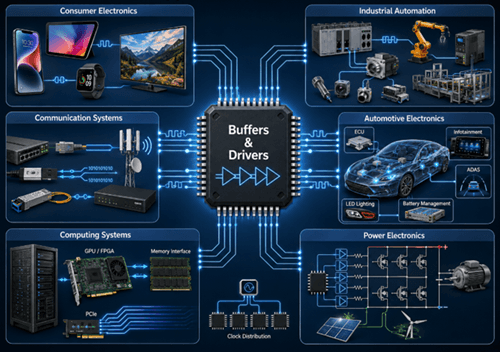
緩衝器與驅動IC用於保護訊號、提升驅動強度及控制電子電路負載。緩衝器主要提升訊號隔離、扇出與訊號完整性,而驅動器則為繼電器、LED、MOSFET、馬達、長線路或通訊線路提供較高的電流或電壓。本文比較緩衝區與驅動IC、其類型、應用、差分通訊用途及選擇因素。

什麼是緩衝區/驅動程式?
緩衝器/驅動器是一種電子電路,用於將訊號從系統的一個部分傳送到另一個部分,而不削弱、延遲或過載源電路。當訊號通過長長的PCB走線、電纜、匯流排或多個連接裝置時,它有助於維持訊號完整性。
緩衝器主要用來隔離各級電路,並減少負載效應。驅動器能提升訊號的電流或電壓能力,使低功耗控制電路能驅動更大負載、更快負載、LED、繼電器、MOSFET、馬達或通訊線路。雖然緩衝區與驅動程式功能不同,許多積體電路將兩者功能整合於同一裝置中。
例如,微控制器腳位不應直接驅動馬達、繼電器或長訊號線。驅動器或緩衝器負責處理電力負載,同時保護控制器並保持訊號穩定。
| 項目 | 緩衝區 | 駕駛員 |
|---|---|---|
| 主要目的 | 隔離並維持訊號品質 | 提升電流或電壓驅動能力 |
| 典型負載 | 邏輯輸入、匯流排、時鐘線 | MOSFET 閘極、LED、繼電器、馬達、長纜線 |
| 輸出強度 | 中等 | 更高 |
| 主要關注點 | 載入、扇出、訊號完整性 | 電流、熱度、切換速度、保護 |
| 常見範例 | 74HC125、74HC244、SN74LVC系列 | ULN2003、MOSFET 單體、RS-485 單體、馬達單體 |
緩衝區/驅動程式的運作方式
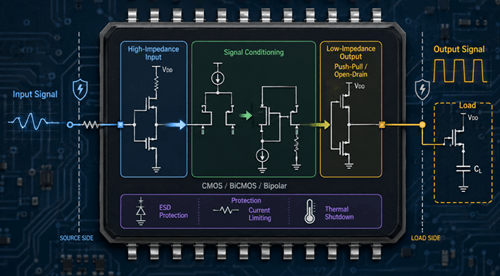
緩衝器/驅動器的工作原理是將輸入訊號在輸出端重現,並具備更強的強度、穩定性及負載驅動能力。在裝置內部,基於電晶體的級會根據所需的速度、電壓和電流,使用 CMOS、BiCMOS 或雙極性技術處理訊號。輸入端通常具有高阻抗,意即從源電路抽取的電流非常少。這樣可以防止電壓下降、減少波形失真,並保持原始訊號的穩定。
接收訊號後,緩衝區/驅動程式會對訊號進行調整,並傳送至設計用於處理負載的輸出級。此輸出級通常為低阻抗,可能採用推挽或開漏結構。推挽輸出可提供與吸收電流,提升扇出、上升時間、下降時間及切換性能。在較強的驅動電路中,輸出級也能為電容負載(如 MOSFET 或 IGBT 閘極)提供高峰值電流。
緩衝器/驅動器同時將源電路與負載隔離,因此電容、電流需求或電氣雜訊的變化不會直接干擾原始訊號。許多現代裝置具備靜止電保護、電流限制及熱關機等保護功能,以提升可靠性。在高速系統中,效能取決於傳播延遲、上升時間和下降時間,因為這些時間決定了訊號從輸入到輸出的速度與準確度。
緩衝器與驅動電路的類型
不同的緩衝器與驅動電路是針對特定電壓等級、切換速度、訊號條件及負載需求設計的。有些用於淨化和強化數位邏輯訊號,另一些則提供驅動匯流排、LED、馬達、功率電晶體或高速通訊路徑所需的電流。
| 類型 | 主要功能 | 典型用途 | 範例裝置 |
|---|---|---|---|
| 邏輯緩衝區 | 強化或隔離數位邏輯訊號 | MCU 輸出、FPGA 介面、時脈線、數位匯流排 | 74HC125、74HC244、SN74LVC系列 |
| 三態緩衝區 | 新增高阻抗、低阻抗及高阻抗輸出狀態 | 共享匯流排、記憶體系統、微處理器介面 | 74HC125, 74HC244 |
| 公車司機 | 驅動較大的數位匯流排或多個邏輯輸入 | 處理器匯流排、記憶體介面、FPGA 訊號路由 | 74LVC245, 74HC245 |
| 電平移緩衝區 | 在不同邏輯電壓間傳遞訊號 | 1.8V、3.3V 與 5V 混合電壓系統 | TXB/TXS 系列,SN74LVC 系列 |
| 裝載驅動器 | 允許邏輯電路控制較高電流負載 | 繼電器、LED、電磁閥、小型馬達 | ULN2003,ULN2803 |
| 閘門驅動 | 驅動 MOSFET、IGBT、GaN 或 SiC 電源開關 | 電源供應器、馬達驅動、逆變器、電動車系統 | UCC27511,IR2110,隔離閘極驅動器 |
| 差動驅動器 | 透過嘈雜或長距離連結傳送訊號 | RS-485、CAN、LVDS、乙太網路、工業網路 | MAX485,SN65HVD系列 |
數位邏輯緩衝器
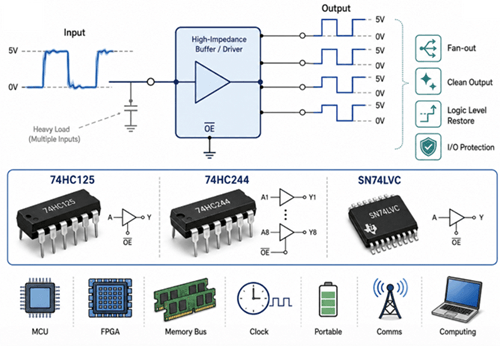
數位邏輯緩衝器在輸出端重現輸入訊號,同時降低源電路的電氣負載。當一個 MCU、處理器或 FPGA 腳位需要驅動多個邏輯輸入、長的 PCB 走線或時脈線時,它們非常有用。
邏輯緩衝器有助於維持有效的高低電壓水平,改善扇出,並降低邊緣緩慢或切換不穩定的風險。現代低壓邏輯系列在需要1.8V、2.5V或3.3V操作的緊湊系統中也很有用。
三州緩衝區與匯流排驅動程式
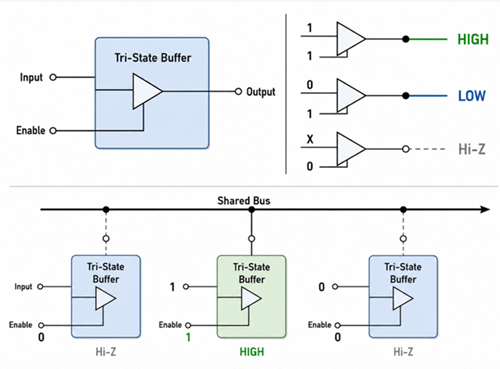
三態緩衝器提供三種輸出狀態:邏輯高電平、邏輯低電平和高阻抗。高阻抗狀態會將輸出端與匯流排斷開,使多個裝置能共用同一條訊號線,而不會互相衝突。
當訊號需要驅動多個輸入或穿越較寬的數位匯流排時,會使用匯流排驅動器。它們常見於記憶體系統、微處理器介面、FPGA 板卡及資料線,這些領域需要保持訊號強度與時序的穩定。
電平移緩衝區
當兩個電路在不同邏輯電壓下運作時,會使用電平移緩衝器。例如,1.8V 感測器可能需要與 3.3V MCU 通訊,或 3.3V 控制器需要與 5V 周邊設備介接。
若未適當電平移位,訊號可能無法達到接收裝置的輸入閾值,或高電壓側可能損壞低電壓電路。電平移緩衝器有助於維持混合電壓裝置間安全且正確的邏輯通訊。
載入驅動 IC
負載驅動IC允許低功耗邏輯電路控制較高電流的負載。微控制器腳位無法直接驅動繼電器、電磁閥、高亮度 LED 或小型馬達,因為這些負載需要比腳位安全提供的電流更多。
像ULN2003和ULN2803這類裝置使用電晶體驅動單元來處理較高的負載電流。它們適用於繼電器板、LED控制、電磁閥驅動電路、步進馬達相位以及簡單的自動化系統。
緩衝區與驅動程式的常見應用
當訊號需要更強的驅動能力、更好的隔離、更乾淨的時序或更安全的負載控制時,會使用緩衝器和驅動器。不同應用會根據訊號速度、負載電流、電壓電平及噪音環境使用不同的驅動類型。
| 應用領域 | 共用緩衝區或驅動程式類型 | 為何使用此詞 |
|---|---|---|
| 微控制器與 GPIO 電路 | 邏輯緩衝區,電平移緩衝區 | 保護 MCU 腳位、改善風扇輸出,並匹配不同邏輯電壓等級 |
| FPGA 與處理器介面 | 邏輯緩衝區、匯流排驅動程式、時脈緩衝區 | 維持時序準確度並減少高速數位線路的負載 |
| 記憶體與資料匯流排 | 三態緩衝器,匯流排驅動 | 允許共用匯流排控制並防止裝置間的訊號衝突 |
| 長長的PCB走線與電纜 | 線性驅動器、差動驅動器 | 強化訊號並降低距離上的雜訊敏感性 |
| RS-485、CAN 與工業網路 | 差分驅動器、收發器 | 提升噪音抑制能力,並支援惡劣環境下的可靠通訊 |
| LED 與繼電器控制 | 載入驅動器,電晶體陣列 | 允許低功率邏輯訊號控制較高電流負載 |
| MOSFET 與 IGBT 切換 | 閘門驅動 | 提供峰值電流以實現快速切換及降低功率損耗 |
| 馬達控制與電力電子 | 動力司機,閘門司機 | 控制電流流動、切換速度、扭力及保護功能 |
| 汽車電子 | CAN 驅動程式、閘控驅動程式、載入驅動程式 | 支援嘈雜環境、分散式控制及高電流負載 |
| 電源供應器與逆變器 | MOSFET、IGBT、GaN 或 SiC 閘極驅動器 | 提升開關效率、熱性能及功率級控制 |
通訊與差分驅動因素
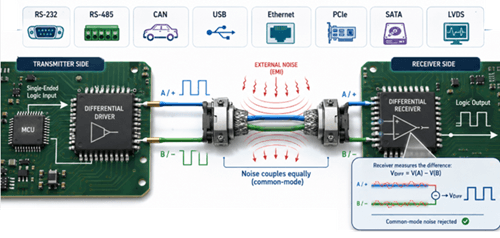
當訊號必須通過電纜、連接器、長長的PCB走線或電氣雜訊環境時,會使用通訊與差分驅動器。許多系統不以以接地為基準的電壓傳送訊號,而是使用差分訊號,接收端測量兩條互補訊號線之間的電壓差。
此方法提升了噪聲抑制、減少共模干擾,並支援更長距離或更高速度的穩定資料傳輸。
為什麼差分驅動因素能改善溝通
在單端訊號中,接地參考線或訊號線上的雜訊會直接干擾接收電壓。在差分訊號中,外部雜訊常以類似方式耦合兩條線路。由於接收器讀取兩條線路的差異,許多這些常見雜訊會被剔除。這也是為什麼差動驅動器廣泛應用於工業、汽車、電腦及通訊系統。
| 介面 | 典型駕駛員類型 | 主要優勢 |
|---|---|---|
| RS-485 | 差動線驅動器 | 長距離與抗噪工業通訊 |
| 可以 | 差分收發器 | 穩健的車輛與工業網路通訊 |
| LVDS | 低壓差動驅動器 | 高速、低雜訊板電平訊號 |
| USB | 差分訊號驅動 | 可靠的串列資料傳輸 |
| 乙太網路 | 差分物理層訊號 | 長距離有線通訊與網路連接 |
| PCIe / SATA | 高速差速驅動器 | 高資料率與受控訊號完整性 |
如何選擇緩衝區或驅動IC
選擇合適的緩衝器或驅動IC取決於訊號來源、負載類型、電壓等級、開關速度、輸出電流及PCB環境。邏輯緩衝器通常用於保護和強化訊號,而驅動器則用於電路必須控制較重負載、較長的線路、電纜、MOSFET 閘極、繼電器、LED 或馬達。
如何選擇正確的緩衝區或驅動 IC
| 設計需求 | 更好的選擇 | 要檢查什麼 |
|---|---|---|
| 一個訊號驅動多個邏輯輸入 | 邏輯緩衝區 | 扇出、輸入電容、輸出電流 |
| 多個裝置共用同一個匯流排 | 三態緩衝區 | 啟用控制、高阻抗狀態、母線衝突風險 |
| MCU 或 FPGA 連接到不同的電壓等級 | 電平移緩衝區 | 輸入/輸出電壓範圍、邏輯閾值 |
| 訊號會沿著一條長的PCB走線傳送 | 總線司機或線路司機 | 驅動強度、傳播延遲、終端 |
| 訊號會透過電纜或雜訊環境傳播 | 差動驅動器 | RS-485、CAN、LVDS、抗噪音、電纜長度 |
| 邏輯腳控制繼電器、LED 或電磁閥 | 裝載驅動器 | 輸出電流、夾位二極體、散熱 |
| PWM 訊號控制 MOSFET 或 IGBT | 閘門驅動 | 峰值電流、閘極電壓、切換速度 |
| 高速時脈或資料訊號需要乾淨的時序 | 高速緩衝器 | 偏斜、抖動、升降時間、版面品質 |
對於簡單的邏輯訊號,先檢查電壓相容性和扇出。對於高電流或高速負載,請檢查輸出電流、熱額定、傳播延遲、切換邊緣速度及佈局需求。
故障排除
| 常見問題 | 原因 | 影響 | 解答 |
|---|---|---|---|
| 訊號振鈴與反射 | 終端不當或阻抗不匹配 | 訊號失真與通訊錯誤 | 請正確終端與受阻抗路由 |
| 單體過熱 | 電流過大、冷卻不良或封裝評定不足 | 熱關機或裝置故障 | 降低負載電流、改善散熱,或選擇較高額定的驅動器 |
| 時序誤差 | 過度的傳播延遲、偏斜或路由不良 | 同步失敗與資料錯誤 | 使用更快的驅動程式,匹配走線長度,並優化路由 |
| 噪音與電磁干擾 | 接地不良、邊緣速率快或解耦弱 | 訊號損壞與干擾 | 改善接地、屏蔽、解耦及佈局分離 |
常見問題 [FAQ]
Q1。扇出如何影響緩衝器或驅動程式的選擇?
高扇出會增加負載電容和電流需求。邏輯緩衝器幫助單一訊號驅動多個輸入,避免弱邏輯電平、邊緣緩慢或時序不穩定。
第二季度。什麼時候應該用三態緩衝器取代標準緩衝器?
當多個裝置共用同一個匯流排時,使用三態緩衝區。其高阻抗狀態會斷開輸出,防止兩個裝置同時驅動線路。
Q3。為什麼長線路或電纜常常需要線路驅動器或差動驅動器?
長訊號路徑會增加電容、噪音拾音、阻抗不匹配及訊號損失。線性驅動器能增強訊號,而差分驅動器則能在距離內提升噪聲抑制效果。
第四季。選擇緩衝區或驅動 IC 時,哪些參數最重要?
檢查電源電壓、邏輯閾值、輸出電流、傳播延遲、升降時間、輸出結構、封裝額定、熱限制及保護特性。
Q5。為什麼錯誤的驅動程式會導致過熱或時序錯誤?
若驅動器電流不足、熱裕度不足或傳播延遲過大,可能會過熱、切換過慢、邊緣扭曲,或在高速電路中造成同步錯誤。










